Designed to showcase various capabilities with a robot hand, Arduino Mega 2560, and Robotic sensors
"Cosmo" robot is designed to showcase various capabilities, including precise line following, obstacle avoidance during line following, navigating ramps at 20 - 30 degrees, interacting with objects using a mechanical arm, sound sensitivity, color detection, and maze-solving capabilities. Additionally, it was programmed to avoid other robots in the arena such as the guard robot, on its way to the final destination.
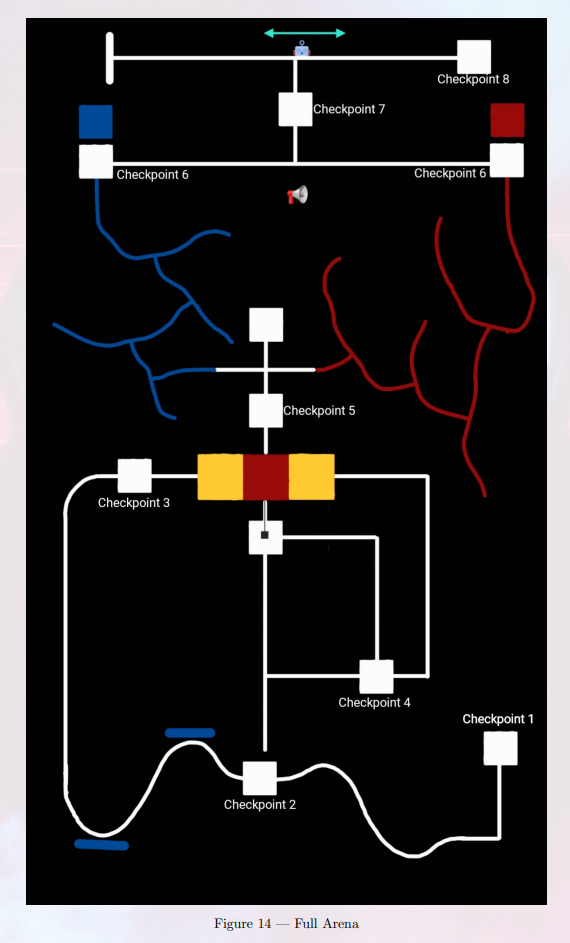
Game Field (Arena) Specifications
Robot will commence it's journey from the designated starting location.
If you are unable to complete the task by starting from the designated starting location, you can start from a checkpoint that is not the designated starting checkpoint with a penalty.
While following the line, the robot shouldn’t collide with any object that isn’t specifically mentioned in the document.
When the robot is navigating from checkpoint - 3 to checkpoint - 4, it must go over the bridge section and follow the line afterward. There will be a line on the bridge, as well.
You can use any mechanism to find the path to reach checkpoint - 5.
Pick and place the colored box in the relevant colored space.
The robot should freeze when sounds emit from the sound tower.
The robot shouldn’t collide with the guard robot.
The game is considered finished when the robot completes all six sub tasks, sequentially.